Radiance field methods (e.g.~3D Gaussian Splatting) have emerged as a powerful paradigm for novel
view
synthesis, yet
their appearance modeling often relies on Spherical Harmonics (SH), which impose fundamental
limitations.
SH struggle with high-frequency signals, exhibit Gibbs ringing artifacts, and critically fail to
capture
specular
reflections - a key component of realistic rendering.
While alternatives like Spherical Gaussians offer improvements, they introduce significant
optimization
complexity.
We propose Spherical Voronoi (SV) as a unified framework for appearance representation in 3D
Gaussian
Splatting.
SV partitions the directional domain into learnable regions with smooth boundaries, providing an
intuitive and stable
parameterization for view-dependent effects.
For diffuse appearance, SV achieves competitive results while maintaining simpler optimization
compared
to existing
alternatives.
For reflections - where SH fundamentally fail - we leverage SV as learnable reflection probes,
taking
reflected
directions as input following principles from traditional graphics.
This formulation achieves state-of-the-art results across both synthetic and real-world datasets,
demonstrating that SV
offers a principled, efficient, and general solution for appearance modeling in explicit 3D
representations.
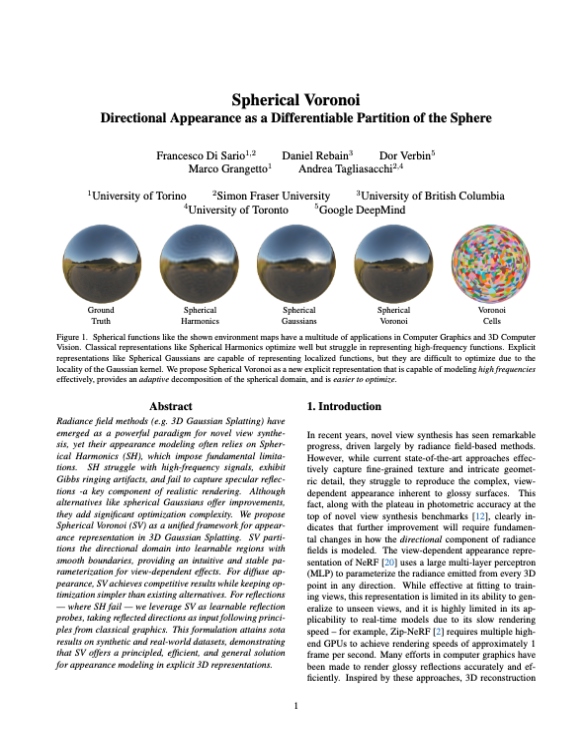
Spherical functions like the shown environment maps have a multitude of applications in Computer Graphics
and 3D Computer Vision. Classical representations like Spherical Harmonics (SH) optimize well but struggle
to represent high-frequency functions. Explicit representations such as Spherical Gaussians (SG) can capture
localized signals but are difficult to optimize due to the locality of support of their bases. We propose
Spherical Voronoi (SV) as a new explicit representation that effectively models high-frequency content,
provides an adaptive decomposition of the spherical domain, and is easier to optimize.
SH are evaluated up to degree L=34, corresponding to 1,225 basis functions per channel
(3,675 parameters in total), which is roughly equivalent in representational capacity to
512 SG or 512 SV sites.
Our Spherical Voronoi model (Ours) consistently improves performance over existing color
parameterizations.
Remarkably, it is the first non–neural-field formulation capable of surpassing strong neural baselines
such as Zip-NeRF
on the MipNeRF-360 dataset.
Voronoi Visualizers
These interactive viewers illustrate our soft Voronoi partition both in 2D
(on the circle) and on the sphere.
On the left, a 2D polar Voronoi shows sites on the unit circle and their soft partition;
on the right, a spherical Voronoi is rendered as an environment map and visualized on a glossy ball.
The number of sites controls the partition complexity, while temperature
controls the sharpness of the boundaries.
Spherical Voronoi (2D)
700
Spherical Voronoi (3D)
1500
Fitting Functions on Spherical Domains
The figure below summarizes an experiment where different spherical representations
were used to fit the same scalar function defined on the unit sphere.
Each method was trained 100 times from random initializations,
allowing us to analyze both accuracy and stability across runs.
Top: reconstructions after optimization.
Bottom-left: random initializations.
Bottom-right: PSNR histograms over 100 runs.
The top row highlights the qualitative behavior of each model, while the histograms
quantify the distribution of PSNR values across the 100 runs.
Spherical Harmonics (SH) converge consistently to the same solution,
showing minimal variance but limited accuracy.
Because SH rely on globally supported basis functions, they cannot represent discontinuities
or sharp angular variations.
As a result, reconstructions appear overly smooth and exhibit the
well-known Gibbs effect near discontinuities — oscillatory artifacts
that cap the mean PSNR at a relatively low value.
Spherical Gaussians (SG) and Spherical Betas (SB)
introduce localized lobes that can model high-frequency content,
but their optimization is highly sensitive to initialization.
Depending on where lobes start, gradients may vanish or compete, leading to
large PSNR variance: a few runs reach good fits, while others get stuck
in poor local minima.
The wide histograms in the figure clearly illustrate this instability.
In contrast, our Spherical Voronoi (SV) representation yields both
high accuracy and lower variance across all 100 runs.
By defining a differentiable, soft tessellation of the sphere,
every region contributes meaningful gradients during optimization.
This prevents the dead zones and kernel overlap problems seen in SG and SB.
The resulting histograms are tight, and the mean PSNR (red dashed line)
lies near the upper end of the attainable range — confirming both
robustness and precision.
Methodology
View Direction Parameterization
We represent view-dependent appearance using a
soft Spherical Voronoi (SV) function defined on the unit sphere.
Each primitive defines a set of directional sites
\( s_k \in \mathbb{S}^2 \) with associated values
\( c_k \in \mathbb{R} \), and evaluates radiance as:
If all temperatures are equal, i.e. \( \tau_k = \tau \ \forall k \),
the formulation corresponds to the standard Spherical Voronoi (SV) model.
Allowing site-dependent temperatures \( \{\tau_k\} \) yields the
weighted Spherical Voronoi variant, enabling independent control over
the angular sharpness of each Voronoi region.
The temperature parameter controls angular sharpness:
low values produce smooth, broad responses, while high values yield sharp,
Voronoi-like partitions of the sphere.
In this setting, we replace spherical harmonics in
3D Gaussian Splatting with SV, obtaining a fully explicit,
differentiable, and more expressive view-directional model.
Reflection-based Parameterization
Following Ref-NeRF, we parameterize glossy reflections by evaluating
directional appearance at the reflected view direction.
For a view direction \( \omega \) and surface normal \( n \), the reflected
direction is:
\[
\omega_r = 2(\omega \cdot n)\,n - \omega.
\]
We model the reflected radiance \( f(\omega_r) \) using
Spherical Voronoi (SV) functions, which can represent sharp
specular lobes, multiple peaks, and even discontinuities, while remaining fully
differentiable.
Spatially Varying Reflections
Evaluating \( f(\omega_r) \) alone assumes far-field illumination,
which breaks down when geometry or light sources are close to the surface.
To capture near-field effects, we introduce a set of
learnable Voronoi light probes, each with position
\( p_i \in \mathbb{R}^3 \), a blending weight \( \alpha_i \in [0,1] \),
and SV parameters encoding a local reflection field.
For a surface point \( P \), we gather its \( k \)-nearest probes
\( \mathcal{N} = \mathrm{kNN}(P) \) and compute normalized inverse-distance
weights:
We adopt a deferred rendering pipeline based on 2D Gaussian
splats.
In the geometry pass, primitives are rasterized into per-pixel buffers storing
position \( P(u,v) \), normal \( N(u,v) \), roughness \( R(u,v) \),
and diffuse color \( D(u,v) \).
The final shaded color is:
\[
C = D + C_{\text{spec}},
\]
where the specular term blends near- and far-field contributions:
The far-field component \( C_f \) is obtained from a learnable environment
cubemap, evaluated at the reflected direction \( \omega_r \).
Surface roughness controls the angular sharpness of the SV lobes via:
where \( \tau_{\min} \) and \( \tau_{\max} \) are fixed hyperparameters.
Low roughness yields sharp, mirror-like reflections (high \( \tau \)), while
high roughness produces broader responses, resulting in a unified and explicit
model for both diffuse and glossy appearance.
The 2DGS scene is rasterized into
buffers of positions, normals, roughness, and diffuse colors.
In the lighting pass, learnable Spherical Voronoi light probes (near-field)
and an environment cubemap (far-field) jointly produce diffuse and specular shading,
blended to form the final output. All components are fully explicit and optimized end-to-end.
Left: When illumination is spatially varying but a spatially-invariant
model is used,
conflicting measurements are averaged, resulting in a blurry reconstruction. Conversely,
when a spatially
varying model is used, crisp functions can be recovered.
Right: Effect of the temperature \( \tau \) on SV sharpness, from smooth
diffuse-like lobes to sharp, highly specular peaks.
Results - View Direction Parameterization
Our method achieves comparable quality to Zip-NeRF on the Mip-NeRF360 dataset, while delivering significantly
higher
accuracy on other standard benchmarks such as NeRF Synthetic and Tanks & Temples.
Comparison with Zip-NeRF
Bonsai
Bicycle
Kitchen
Counter
Garden
Room
Stump
Ours
Zip-NeRF
Ours
Zip-NeRF
Ours
Zip-NeRF
Ours
Zip-NeRF
Ours
Zip-NeRF
Ours
Zip-NeRF
Ours
Zip-NeRF
Comparison with Ground Truth
Bonsai
Bicycle
Kitchen
Counter
Garden
Room
Stump
Ours
Ground Truth
Ours
Ground Truth
Ours
Ground Truth
Ours
Ground Truth
Ours
Ground Truth
Ours
Ground Truth
Ours
Ground Truth
Results - Reflection-based Parameterization
Scene Decomposition
Our method allows for a detailed scene decomposition into physically interpretable components, such as
diffuse, specular, surface normals, and roughness.
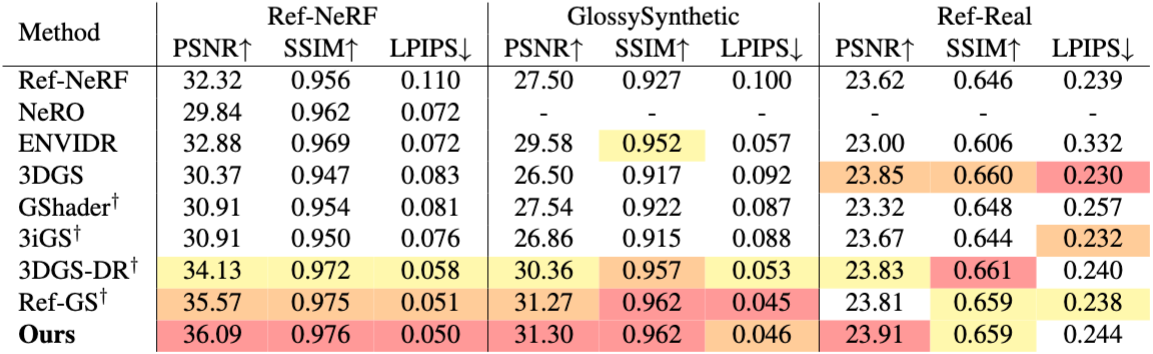
Comparison with SoTA
Our method produces slightly better results than Ref-GS on standard reflective benchmarks, while
significantly
outperforming other baseline methods. It is a fully explicit approach based on learnable light probes
parameterized
by a Spherical Voronoi function.
Our method consistently achieves top-tier performance across all datasets.
Methods marked with † were retrained
for consistency, and most results were successfully reproduced. Ref-GS performs slightly better than
originally
reported
on Ref-NeRF and GlossySynthetic, but worse on Ref-Real, likely because the original implementation
did not use the
dataset’s pre-downsampled input images.
Gardenspheres
Ours vs Ref-GS
Ours vs 3DGS-DR
Ours vs GShader
Ours
Ref-GS
Ours
3DGS-DR
Ours
GShader
Car
Ours vs Ground Truth
Ours vs Ref-GS
Ours vs 3DGS-DR
Ours vs GShader
Ours
Ground Truth
Ours
Ref-GS
Ours
3DGS-DR
Ours
GShader
Teapot
Ours vs Ref-GS
Ours vs 3DGS-DR
Ours vs GShader
Ours
Ref-GS
Ours
3DGS-DR
Ours
GShader
Ball
Ours vs Ground Truth
Ours vs Ref-GS
Ours vs 3DGS-DR
Ours vs GShader
Ours
Ground Truth
Ours
Ref-GS
Ours
3DGS-DR
Ours
GShader
Toaster
Ours vs Ground Truth
Ours vs Ref-GS
Ours vs 3DGS-DR
Ours vs GShader
Ours
Ground Truth
Ours
Ref-GS
Ours
3DGS-DR
Ours
GShader
Bell
Ours vs Ref-GS
Ours vs 3DGS-DR
Ours vs GShader
Ours
Ref-GS
Ours
3DGS-DR
Ours
GShader
Helmet
Ours vs Ground Truth
Ours vs Ref-GS
Ours vs 3DGS-DR
Ours vs GShader
Ours
Ground Truth
Ours
Ref-GS
Ours
3DGS-DR
Ours
GShader
Citation
@article{disario2025sphericalvoronoidirectionalappearance,
title={Spherical Voronoi: Directional Appearance as a Differentiable Partition of the Sphere},
author={Di Sario, Francesco and Rebain, Daniel and Verbin, Dor and Grangetto, Marco and Tagliasacchi, Andrea},
journal={arXiv preprint arXiv:2512.14180},
year={2025}
}





 Paper
Paper
 arXiv
arXiv
 Code
Code
 Colab
Colab